Card 9 - JOINT Definition
This optional card defines a joint for an articulating member.
Parameters: KODE, N1, T1,
T2, T3
KODE
KODE is the code JOINT (or 50)
N1
N1 is the joint number.
T1
T1 is the joint type. It can be REVOLUTE for a rotational joint or
TRANSLATIONAL for a translational joint.
T2
T2 is a parent joint number. The parent joint number is zero when
the joint is a primary joint.
T3
T3 is a vector number. For a rotational joint, the elements rotate
about the given vector. For a translational joint, the elements move along the given
vector. For more information, see Card 9 - VECTOR.
Code example
ARTICUT 1 ARTICG1 5.
JOINT 1 REVOLUTE 0 1
VECTOR 1 0. 0. 0. 0. 0. 1.
$
$ ELEMENTS IN GROUP ARTICG1 ROTATE AT A SPEED OF 5 DEGREES PER SECOND ABOUT
$ VECTOR 1.
$
ARTICUT 2 ARTICG2 10.
JOINT 2 REVOLUTE 1 2
VECTOR 2 1. 0. 0. 0. 0. 1.
$
$ ELEMENTS IN GROUP ARTICG2 ROTATE AT A SPEED OF 10 DEGREES PER SECOND ABOUT
$ VECTOR 2 RELATIVE TO ELEMENTS OF GROUP ARTICG1. THE ABSOLUTE MOVEMENT OF JOINT 2
$ IS THE MOVEMENT OF JOINT 2 RELATIVE TO JOINT 1 PLUS THE MOVEMENT OF JOINT 1.Notes
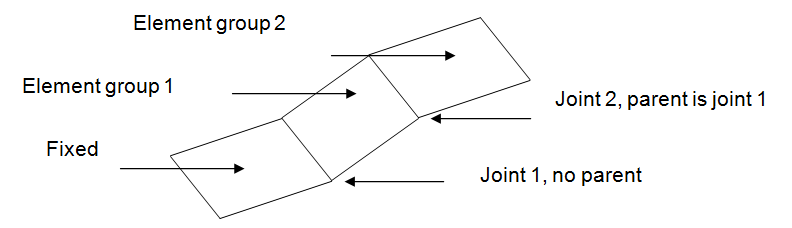
The movement of an articulating member is defined by both ARTICUT and JOINT Cards. An articulation may consist of multiple joints. These joints form a chain.
An example of such a joint chain is a robotic arm. The multi-joint articulation is handled by assigning a parent to a joint to represent the relative movement. A parent of a joint can have its own parent. Only the first joint in a chain has no parent.
The joint definition is used with an articulation definition card 9 ARTICUT. The joint number of the joint definition card is associated with the same joint number of the articulation definition card.